
The two wheels in the back with all the power and the two small ones in the front making the bot much lighter, fewer parts on the bot would make the bot lighter and faster.
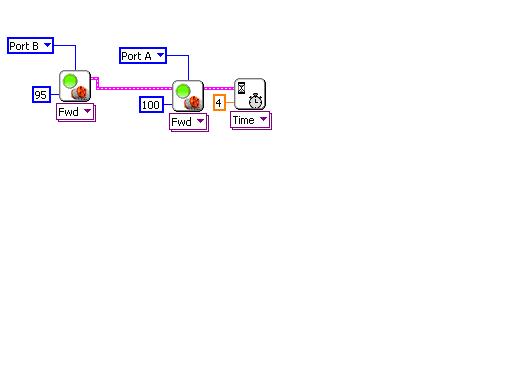
from point a - b going 20 feet only taking 4 seconds to reach the check mark (20 ft) but changing the power levels would help the bot straighten out and get to the destination
1. The project which i called mine the 20 foot dash you had to get your robot to reach the destination of the line at 20 ft and be able to stop and reach it with time and power levels you set for your robot.
2. Input factors - need to know how long you are tested to go and you will need to do test runs and manage the robots power levels some times change parts to make sure it is going straight so you don't have to mess with the times and power levels all the time.
3. Are gears started off as a big to small ratio
4. The final output, two wheels spread out in the back and two small wheels put together in the front
5. no feedback, did it on my own and judged my own robot
6. I learned the big to small ratio in gears makes the bot faster
7. I would spend more time on it and make sure it gets done at the right time.
2. Input factors - need to know how long you are tested to go and you will need to do test runs and manage the robots power levels some times change parts to make sure it is going straight so you don't have to mess with the times and power levels all the time.
3. Are gears started off as a big to small ratio
4. The final output, two wheels spread out in the back and two small wheels put together in the front
5. no feedback, did it on my own and judged my own robot
6. I learned the big to small ratio in gears makes the bot faster
7. I would spend more time on it and make sure it gets done at the right time.
